Objective of the Tutorial
The objective of this topic is to:
•Continue to demonstrate how easy it is to add dyads to build more complex kinematic-chains •Continue to demonstrate that the Point in Pin-Joints do not need to include the start-Point or end-Point of the CAD-Line along a Part, and Slide-Joints do not need to include the CAD-Line along a Part. •Add the R-R-P dyad. |
Remember, there are 5 different planar dyads.
These are kinematic-chains with six-bars. It is easy to add a new dyad again to assemble kinematic-chains with eight-bars. And so on, to assemble kinematic-chains with 10, 12, 14, ... and more Parts.
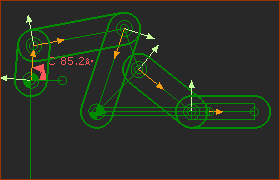
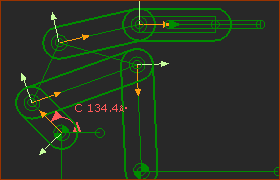
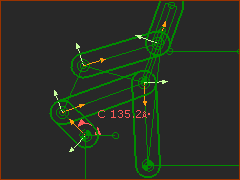
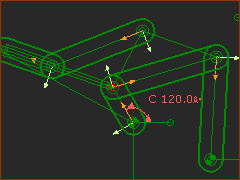
Other 6-Bar Mechanisms: Crank + R-R-R dyad + R-R-P dyad.
 |
|
|
 |
|
|
 |
||
 |
||