Modeling a Rotating Link
Refer Mass and Stiffness to a Point or Axis
To reduce a multi degree-of-freedom model to a single degree-of-freedom model, we must refer the mass moment-of-inertia and torsional-rigidity, or mass and linear-stiffness, of each Part in a kinematic-chain to a single mass and stiffness at the Follower.
You must transform the values in such as a way that the dynamic properties of the one degree-of-freedom model are equivalent to the original many degrees-of-freedom model.
Mass Moment-of-Inertia
To calculate the Force to Accelerate a body along a straight-line, you must know the Mass of the body.
To calculate the Torque to Accelerate a body about an axis-of-rotation, you must know the Mass Moment of Inertia of the body about the axis-of-rotation.
Mass Moment-of-Inertia of a Point-Mass
The Mass Moment-of-Inertia of a Point-Mass (a mass at a point) about an axis-of-rotation is equal to the product of the Mass and the square of its distance from the axis-of-rotation.
 Point Mass at Radius |
Note A Point-Mass is an idealized concept of a finite mass reduced to a single point (singularity!), without any physical size - is it a Black Hole? |
Mass Moment of Inertia of a distributed mass.
If we consider a solid body as a distribution of elemental masses about a chosen rotational-axis, then the Mass Moment-of-Inertia of the solid body is the sum of the product of each elemental mass and the square of its radius from the rotational-axis.
Mass Moment of Inertia of geometric shapes
Simple geometric shapes have standard formulas that you can use to evaluate the Mass Moment-of-Inertia, usually at the Center-of-Mass and about the axis perpendicular to the rotational plane.
Example: the Mass Moment-of-Inertia, , of a rectangular, prismatic body, that rotates about an axis, , that is perpendicular to a plane, and through the Center-of-Mass*, is: |
|
 Extruded Rectangle |
The mass is:
* Center-of-Mass = Center-of-Gravity when the density of link is uniform. |
Parallel Axis Theorem, Mass Moment of Inertia about a parallel axis.
We can use the Parallel Axis Theorem to calculate the Mass Moment-of-Inertia about any axis that is parallel to The image below shows the rectangular link, but now it rotates about the axis , which is parallel to . We use the Parallel Axis Theorem to calculate the Mass Moment of Inertia of the link about the axis . |
|
 Parallel Axis Theorem |
|
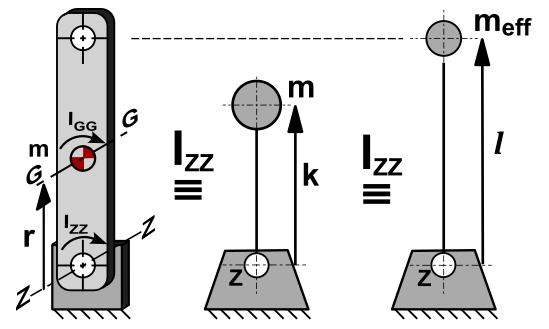
The Concept of Radius-of Gyration.
The mass of all solid-bodies is distributed throughout the body, and we can calculate its Mass Moment of Inertia about an axis of rotation. It is sometimes useful to redefine the Mass Moment of Inertia of the body as a Point-Mass at a particular radius from the axis of rotation. The mass of the Point-Mass is a function of its radius from the axis of rotation by the equations above. However, if we fix the mass (of the Point-Mass) as equal to the actual Mass of the solid-body, then its radius is also fixed, when the body is with Point is to have the same Mass Moment of Inertia as the solid-body with distributed mass. |
|
|
To calculate the radius - which we call the Radius-of-Gyration, - we need to know the Mass Moment of Inertia about an axis. In this case we know the value of from:
|
Note: If the Mass Moment of Inertia is about a different rotational-axis, e.g. , the Mass Moment of Inertia changes AND the Radius-of-Gyration, , will also change. |
|

The Concept of Equivalent-Mass.
When we calculate the Radius of Gyration, we fix the Mass of the Body. However, it is sometimes useful to define the Radius for a Point-Mass from an axis of rotation, such that the Mass Moment of Inertia is equal to that of the solid-body about the same axis of rotation. We assume we know the Radius at which we want to put the Point-Mass from the axis-of-rotation. For example, we want to refer the Mass Moment of Inertia as a mass at the end of a lever, such that Mass Moment of Inertia of the lever does not change. |
|
 |
|
|
|
Transforming a Mass across a Lever to give an equal Mass Moment of Inertia
Referring Masses across a Lever
 Reduction of a Effective Mass 'across' a lever ratio Use the Kinetic-Energy of a Mass to equate the Mass at points A and B.
|
Referring Springs across a Lever
 Reduction of Spring's Stiffness 'across' a Lever Ratio Use the Potential-Energy of a Spring to equate the Spring-Rate at points A and B.
|