The Scotch-Yoke Kinematic-Chain
A Scotch-Yoke is a mechanism that changes rotary motion at its input to linear motion at its output. The kinematic-chain is: 1.One Motion-Part – a Rocker / Crank 2.One dyad – an R-P-P dyad. Closure - Review the Change Dyad Closure tool - you may need to use it after the dyad builds the first time). Note: When the crank has constant angular velocity, the motion of output Slider is Simple Harmonic Motion However, there are two Motion-Laws in MotionDesigner that can modulate* the rotation of the Crank in a useful way. The Y-Inverse-Sinusoid and the Crank-Constant-Velocity modulate the Crank rotation so that the Slider moves with a Constant Linear Velocity for a period of its rotation. * Modulate is to change the speed of the Crank as it rotates. |
|||
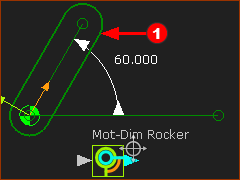
The video is of a Scotch-Yoke. STEP 1: Add the Input – a Crank
|
|||
|
|||
|
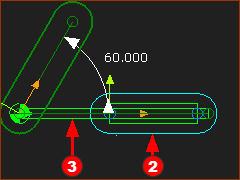
STEP 2: Add R-P-P DYAD
DYAD: Part-B
|
||
|
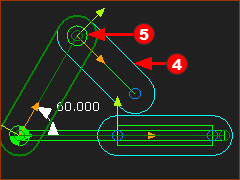
DYAD: Part-A
The two Parts are not solved. We must add one more joint. |
||
|
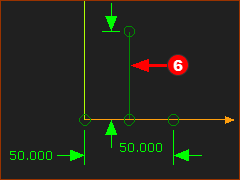
Prepare to add Slide-Joint (Joint-B)
This image has the vertical Line |
||
|
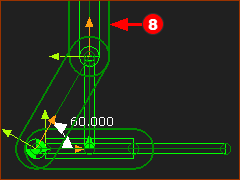
Add Joint 3: the Slide-Joint (Joint-B)
The Parts are now kinematically-defined. Note:
Cycle the mechanism Press the ALT+C key combination on your keyboard |
||
|
|||
|
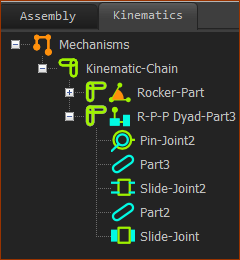
These are the element in the kinematics-tree for a Scotch-Yoke. There is a:
|
||