A Whitworth kinematic-chain – or a Quick-Return kinematic-chain
A Whitworth Quick Return changes rotary movement to a back-and-forth movement. The Part moves faster in one direction than the other. This kinematic-chain has: 1.A Motion-Part – a Crank 2.Two dyads – an R-P-R and an R-R-P dyad |
||||
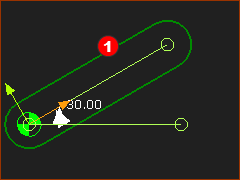
The video is of the Whitworth Quick-Return kinematic-chain. Input: A Crank – the Motion-Part Output: It slides quickly in one direction and slowly in the other direction. This is the termed Quick-Return. STEP 1: Add the Input Part – a Crank
|
||||
|
||||
|
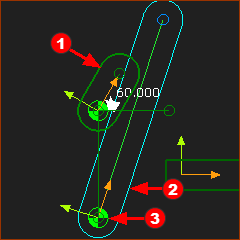
STEP 2: Add dyad 1
|
|||
|
Dyad 1: Part 2 and Joint 3
Dyad 1: Joint 2
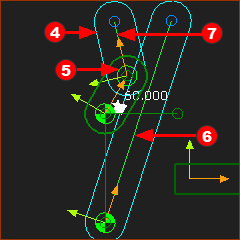
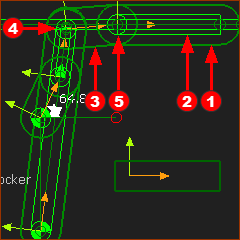
This is the basic Whitworth Quick Return kinematic-chain. The output Part moves quickly as the Crank (input) rotates from (counter clockwise) from 240 to 330 degrees, and more slowly as the crank rotates from 330 to 240 degrees. |
|||
|
||||
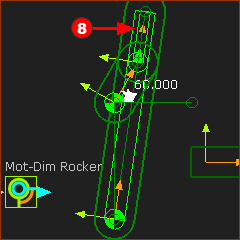
The length of the Crank and the distance between the Pin-Joints in the Base-Part give the 'Return Ratio'.
Experiment with the length of the Crank. |
||||
|
Add dyad 2 - a dyad ALWAYS has two Parts and three Joints
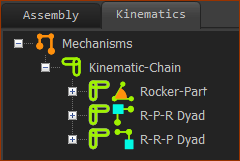
In the Kinematics-Tree, there is one kinematic-chain. It has a:
|
|||
|
||||