A Rotating Rocker – a Crank
We connect a Linear-Motion FB to rotate the Rocker with a constant angular-velocity. This Step helps to understand:
Prepare the Model
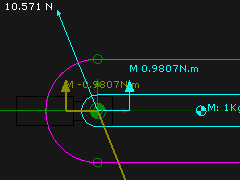
The forces in the mechanism below act at the Pin-Joint - the rotation axis of the Rocker. |
||||
|
Summation of Vertical Forces that act on the Rocker
Summation of Horizontal Forces acting on the Rocker (Point 2) : (→ +ve).
Summation of Moments that act on the Rocker:
|
|||
|
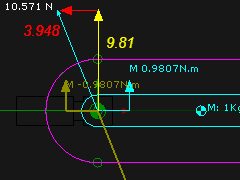
When the Rocker is Horizontal The Horizontal and Vertical Forces are perpendicular(⊥) when the Rocker is horizontal. Hence, we can use Pythagoras:
|
|||