Save all as ...
|
To save all motions to one file with a new file-name:
|
||
Note: When you save the MechDesigner model to a CXL file, we also save for you all of the motions to one MTD file with the same file-name as the CXL file. See also: Save All, Save Active Motion, Delete/Remove, Add Motion , Open and Append |
|||

Save as Motion file-types
MTD: MotionDesigner file-type Save all of the Motions to one MTD file. DA: Jetter file-type Save as the Jetter Automation file-type - see below. TXT: Logix 5000 Cam file (beta-testing) file-type Save as the Allen-Bradley (Rockwell) Logix 5000 Cam file-type. |
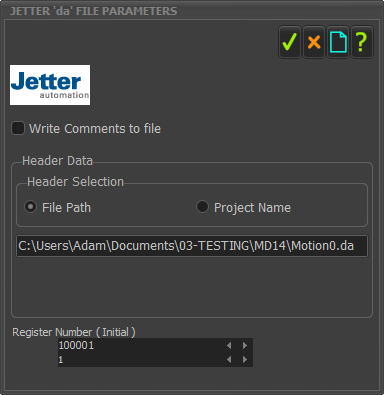 |
Write Comments to File Click the check-box if you want the DA file to explain the function and parameter of each line Header Data box Use the check-box to write, as text, at the top of the DA file: •File Path - the path is in the box- it is read-only. - or - •Project Name - you must write the Project Name in the box Register Number at Start box Enter a Register Offset in the box OK, Close, Cancel or Help buttons MotionDesigner saves each motion to a different file. The file-name is the Motion name-tab. |
Notes on the DA file All motion-type are saved as the Polynomial file-type, with their coefficients. If the segment is a Traditional Motion-Law of the Harmonic Type, for example Modified-Sinusoid, then: 1.The actual Mod-Sine segment is divided into sub-segments. The Blend-Points for the sub-segments are at the 'natural' positions within the Segment. 2.The sub-segments are saved as Polynomials. The Polynomial coefficients minimize the error between the actual Segment and the Polynomial Segment. For example: •Modified-Sinusoid Motion-Law has three sub-segments •Modified-Trapezoidal Motion-Law has five sub-segments To review the Blend-Points and the sub-segments, do Open and Append and select the DA file-type after you save it. |