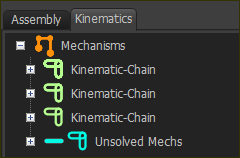
Kinematics-Tree Structure and Symbols
![]() Symbol + “Mechanism” at top of Kinematics-Tree.
Symbol + “Mechanism” at top of Kinematics-Tree.
 |
Symbol |
State |
Mobility |
|
|
Kinematic-Chain (Solved Mech) |
M = 0 |
The kinematic-chain: - is solved - is kinematically-defined |
|
|
Unsolved Mechs |
M > 0 |
The kinematic-chain : - is not fully defined - cannot solve its kinematic-data |
|
Kinematic Sub-Assemblies •Motion-Parts (Rockers, Sliders) Sub-assembly Symbols:
|
||
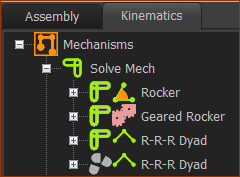 |
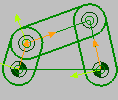
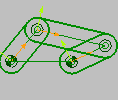
Example. 3 Kinematic-Chains Explored Kinematic-Chain with three sub-assemblies: •Rocker, •R-P-R Dyad •Geared-Rocker |
|
 |
 |
Example 1 : A Dyad that never Breaks ... The Symbol is The Dyad can solve at all values of the Master Machine Angle. |
 |
 |
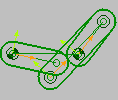
Example 2 : A Dyad that Breaks ... The Symbol is The Dyad is solved now, but it does not solve for ALL values of the Master Machine Angle. |
 |
 |
Example 3 : -The Dyad is broken The Symbol is The Dyad is not solved at this value of the Master Machine Angle. |
You can explore the fundamental kinematic elements of each kinematic-chain. At this level you can see: •Parts •Joints (Pin-Joint, Slide-Joint, Ball-Joint) •Motion-Dimensions •Gear-Pairs •Pulley-Joints The symbol, |
|
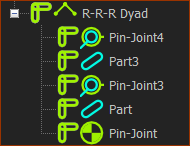 |
Example 1 : A Dyad that does not Break The symbol is The symbol ... that can solve for all values of the Master Machine Angle. |
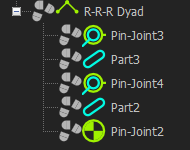 |
Example 2 : A Dyad that does Break The symbol is The symbol ... that can not solve for all values of the Master Machine Angle. |
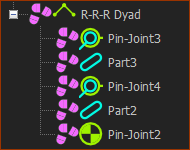 |
Example 2 : A Dyad that is Broken... The symbol is The symbol ... that can not solve at this value of the Master Machine Angle. |
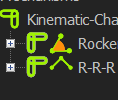
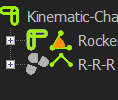
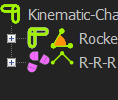
A typical Kinematics-Tree
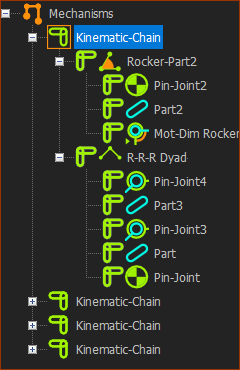 |
This Kinematics-Tree has four(4) Kinematic Defined Chains, identified by the A Rocker is expanded to show three elements: •Pin-Joint, Part, Mot-Dim Rocker The R-R-R Dyads is expanded to show it is assembled from: •Three(3) Pin-Joints , two(2) Parts Dyad and Joint Symbols:
|