What is a Function-Block?
Function-Blocks control, measure, and analyze data. There are two toolbars, which MD17 combines into one menu. Kinematic Function-Blocks : •control the motion of Motion-Parts and Motion-Points •measure and plot the motion of Points and Parts •analyze and export cam-coordinates and cam performance data Modeling Function-Blocks : •provide special functions for more complex modeling •analyze data from the output of Kinematic Function-Blocks •control the model behavior •increase your productivity |
Function-Blocks: Wires and Connectors
|
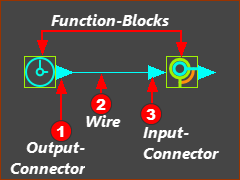
Function-Blocks (most) have input-connectors When you cycle the model, data flows instantly along wires |
 Video - Connecting FBs |
To connect Function-Blocks with a wire ... hover above the output-connector of a Function-Block .... ... drag your mouse-pointer to the input-connector of a different Function-Block ... ... release your mouse button. |
All data has a “Data-Type” For example: the data-type that controls the motion of a Slider is the Linear data-type. The color of a wire is a function of its data-type For example: the wire color of the Linear data-type is Blue. Each Data-Type has three “Data-Channels” For example: the three data-channels of the Linear data-type are Position, Velocity, and Acceleration. |
|
How to arrange the wires that connect Function-Blocks
This image is a schematic of how you can connect with wires the Function-Blocks from the Kinematic Function Blocks toolbar.

Schematic: Function-Block Wires and Connectors
Kinematic Function-Blocks: Data-Types and Data-Channels
Linear-Motion FB Output Data-Type = Rotary Data-Channels: Master Machine Angle, Angular-Velocity, and Angular-Acceleration. The Angular Velocity is proportional to the Cycles / Min - see Machine-Settings dialog. Gearing FB Output Data-Type = Input Data-Type Data-Channels: Linear or Angular Position, Velocity, and Acceleration Motion FB Input Data-Type = Rotary or Linear Output Data-Type = Rotary or Linear Data-Channels: Linear or Angular Position, Velocity, and Acceleration Motion-Dimension FB Input Data-Type = Rotary or Linear Output Data-Type = Rotary if Rocker ; Linear if Slider Data-Channels: Linear or Angular Position, Velocity, and Acceleration Motion-Path FB Input Data-Type = Rotary or Linear Output : no connector Data-Channels: Linear or Angular Position, Velocity, and Acceleration at input-connector Measurement FB Output Data-Type = Rotary or Linear Data-Channels: Linear or Angular Position, Velocity, and Acceleration Point-Data FB Output Data-Type = Linear Data-Channels: Linear or Angular Position, Velocity, and Acceleration Math FB (in Modeling toolbar) Input Data-Type = Linear, Rotary, Force, or Torque Output Data-Type = Any Data-Channels: different Data-Types with different data-channels - see Math FB dialog Force Data FB (in Forces menu and toolbar) Output Data-Type = Torque or Force Data-Channels: Force or Torque, Force parallel with the X-axis, Force parallel with the Y-axis |