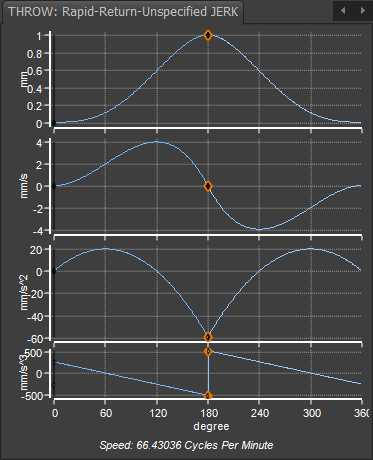
Throw: Rapid-Return Finite Jerk
Characteristics: It has a LARGE negative acceleration, and unspecified Jerk, at its maximum displacement - the transition from Rise to Return. Also, it has zero-jerk at the Start of the Rise and at the end of the Return. |
|
|
|
Motion-Values of each motion-derivative Start of Rise segment 1 : •Position = 0 •Velocity = 0 •Acceleration = 0 •Jerk = Unspecified Middle Blend-Point *: •Position = 1 •Velocity = 0 •Acceleration = Unspecified •Jerk = Unspecified End of Return segment 2 : •Position 2 = 0 •Velocity = 0 •Acceleration = 0 •Jerk = Unspecified * Edit the X-axis value of the middle Blend-Point to give an asymmetrical motion. |
|
See also:
•Quick Return 1: Finite Jerk @ Start/End/Mid-Point